现象
1 压力测试过程中,发现被测对象性能不够理想,具体表现为:
进程的系统态CPU消耗20,用户态CPU消耗10,系统idle大约70
2 用ps -o majflt,minflt -C program命令查看,发现majflt每秒增量为0,而minflt每秒增量大于10000。
初步分析
majflt代表major fault,中文名叫大错误,minflt代表minor fault,中文名叫小错误。
这两个数值表示一个进程自启动以来所发生的缺页中断的次数。
当一个进程发生缺页中断的时候,进程会陷入内核态,执行以下操作:
检查要访问的虚拟地址是否合法
查找/分配一个物理页
填充物理页内容(读取磁盘,或者直接置0,或者啥也不干)
建立映射关系(虚拟地址到物理地址)
重新执行发生缺页中断的那条指令
如果第3步,需要读取磁盘,那么这次缺页中断就是majflt,否则就是minflt。
此进程minflt如此之高,一秒10000多次,不得不怀疑它跟进程内核态cpu消耗大有很大关系。
分析代码
查看代码,发现是这么写的:一个请求来,用malloc分配2M内存,请求结束后free这块内存。看日志,发现分配内存语句耗时10us,平均一条请求处理耗时1000us 。 原因已找到!
虽然分配内存语句的耗时在一条处理请求中耗时比重不大,但是这条语句严重影响了性能。要解释清楚原因,需要先了解一下内存分配的原理。
内存分配的原理
从操作系统角度来看,进程分配内存有两种方式,分别由两个系统调用完成:brk和mmap(不考虑共享内存)。brk是将数据段(.data)的最高地址指针_edata往高地址推,mmap是在进程的虚拟地址空间中(一般是堆和栈中间)找一块空闲的。这两种方式分配的都是虚拟内存,没有分配物理内存。在第一次访问已分配的虚拟地址空间的时候,发生缺页中断,操作系统负责分配物理内存,然后建立虚拟内存和物理内存之间的映射关系。
在标准C库中,提供了malloc/free函数分配释放内存,这两个函数底层是由brk,mmap,munmap这些系统调用实现的。
下面以一个例子来说明内存分配的原理:
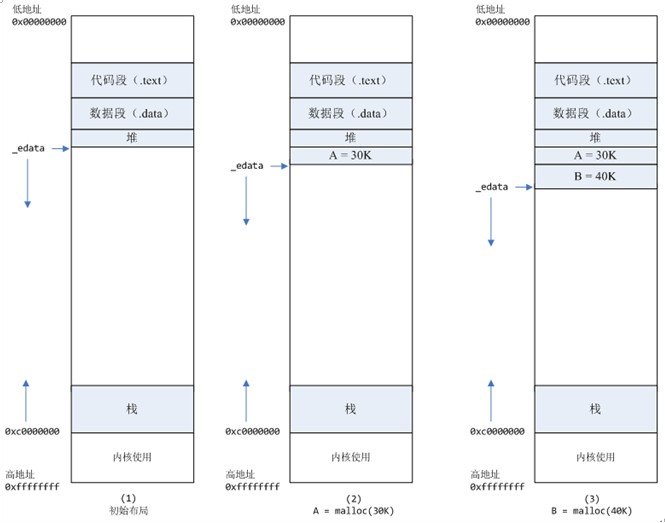
1进程启动的时候,其(虚拟)内存空间的初始布局如图1所示。其中,mmap内存映射文件是在堆和栈的中间(例如libc-2.2.93.so,其它数据文件等),为了简单起见,省略了内存映射文件。_edata指针(glibc里面定义)指向数据段的最高地址。
2进程调用A=malloc(30K)以后,内存空间如图2:malloc函数会调用brk系统调用,将_edata指针往高地址推30K,就完成虚拟内存分配。你可能会问:只要把_edata+30K就完成内存分配了?事实是这样的,_edata+30K只是完成虚拟地址的分配,A这块内存现在还是没有物理页与之对应的,等到进程第一次读写A这块内存的时候,发生缺页中断,这个时候,内核才分配A这块内存对应的物理页。也就是说,如果用malloc分配了A这块内容,然后从来不访问它,那么,A对应的物理页是不会被分配的。
3进程调用B=malloc(40K)以后,内存空间如图3.

4进程调用C=malloc(200K)以后,内存空间如图4:默认情况下,malloc函数分配内存,如果请求内存大于128K(可由M_MMAP_THRESHOLD选项调节),那就不是去推_edata指针了,而是利用mmap系统调用,从堆和栈的中间分配一块虚拟内存。这样子做主要是因为brk分配的内存需要等到高地址内存释放以后才能释放(例如,在B释放之前,A是不可能释放的),而mmap分配的内存可以单独释放。当然,还有其它的好处,也有坏处,再具体下去,有兴趣的同学可以去看glibc里面malloc的代码了。
5进程调用D=malloc(100K)以后,内存空间如图5.
6进程调用free(C)以后,C对应的虚拟内存和物理内存一起释放

7进程调用free(B)以后,如图7所示。B对应的虚拟内存和物理内存都没有释放,因为只有一个_edata指针,如果往回推,那么D这块内存怎么办呢?当然,B这块内存,是可以重用的,如果这个时候再来一个40K的请求,那么malloc很可能就把B这块内存返回回去了。
8进程调用free(D)以后,如图8所示。B和D连接起来,变成一块140K的空闲内存。
9默认情况下:当最高地址空间的空闲内存超过128K(可由M_TRIM_THRESHOLD选项调节)时,执行内存紧缩操作(trim)。在上一个步骤free的时候,发现最高地址空闲内存超过128K,于是内存紧缩,变成图9所示。
真相大白
说完内存分配的原理,那么被测模块在内核态cpu消耗高的原因就很清楚了:每次请求来都malloc一块2M的内存,默认情况下,malloc调用mmap分配内存,请求结束的时候,调用munmap释放内存。假设每个请求需要6个物理页,那么每个请求就会产生6个缺页中断,在2000的压力下,每秒就产生了10000多次缺页中断,这些缺页中断不需要读取磁盘解决,所以叫做minflt;缺页中断在内核态执行,因此进程的内核态cpu消耗很大。缺页中断分散在整个请求的处理过程中,所以表现为分配语句耗时(10us)相对于整条请求的处理时间(1000us)比重很小。
解决办法
将动态内存改为静态分配,或者启动的时候,用malloc为每个线程分配,然后保存在threaddata里面。但是,由于这个模块的特殊性,静态分配,或者启动时候分配都不可行。另外,Linux下默认栈的大小限制是10M,如果在栈上分配几M的内存,有风险。
禁止malloc调用mmap分配内存,禁止内存紧缩。
在进程启动时候,加入以下两行代码:
mallopt(M_MMAP_MAX, 0); // 禁止malloc调用mmap分配内存
mallopt(M_TRIM_THRESHOLD, -1); // 禁止内存紧缩
效果:加入这两行代码以后,用ps命令观察,压力稳定以后,majlt和minflt都为0。进程的系统态cpu从20降到10。
小结
可以用命令ps -o majflt minflt -C program来查看进程的majflt, minflt的值,这两个值都是累加值,从进程启动开始累加。在对高性能要求的程序做压力测试的时候,我们可以多关注一下这两个值。
如果一个进程使用了mmap将很大的数据文件映射到进程的虚拟地址空间,我们需要重点关注majflt的值,因为相比minflt,majflt对于性能的损害是致命的,随机读一次磁盘的耗时数量级在几个毫秒,而minflt只有在大量的时候才会对性能产生影响。





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享














